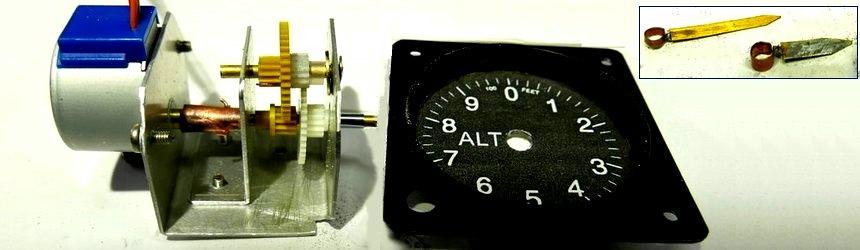
Altimeter
Long hand and short hand
Altimeter is driven by a step motor. It rotates quietly and smoothly.The value of this altimeter is in units of 100feet, and the minute hand rotates 360 ° to 1000feet (about 300m). This is not enough. It displays the upper digit of 10 times like the minute hand and the minute hand of a clock. Even so, the maximum value is 10000 feet. I'd like another digit, but it's difficult to make it triple, so this is the end of the production. It is practical to add a digital display as if it were real.
I would like to add a small 7-segment LED that can be incorporated here if it becomes available.
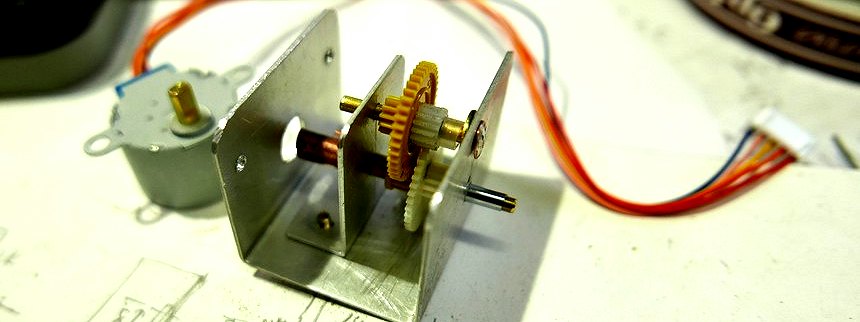
Gear that makes the ratio 1/10
The minute hand of the clock has a rotation ratio of 1/12 of the minute hand, but the altimeter needs to have a rotation ratio of 1/10. For this reason, the gear ratio of the alarm clock cannot be used, so I thought of a combination in which the gears I had were lined up to make it 1/10.There are various gears (spur gears) in stock, such as those bought at Tamiya's gearbox and Nihonbashi digit, and gears left after disassembling the printer. It is a flat gear of module 0.5.
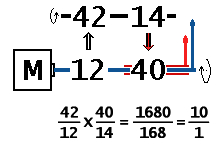
The combination of gears I happened to find while arranging the gears on the desk was (12:42) x (14:40) = 168: 1680.
Even better, It had the same distance between the axes of the two gears with this combination of two gears. The little hand and the big hand can be pile up the shaft.
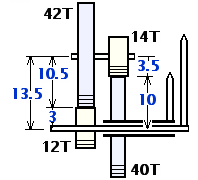 Gear reference circle diameter = module 0.5 x number of teeth
Gear reference circle diameter = module 0.5 x number of teeth
・ Gear with 12 teeth is 0.5 X 12 = 6 (radius is 3 mm)
・ Gear with 42 teeth is 0.5 X 42 = 21 (radius is 10.5 mm)
The distance between the centers of these two gears is 3 + 10.5 = 13.5
・ Similarly, the distance between the centers of gears with 14 teeth and 40 teeth is the same as 3.5 + 10 = 13.5
Gear reference circle diameter = module 0.5 x number of teeth・ Gear with 12 teeth is 0.5 X 12 = 6 (radius is 3 mm)
・ Gear with 42 teeth is 0.5 X 42 = 21 (radius is 10.5 mm)
The distance between the centers of these two gears is 3 + 10.5 = 13.5
・ Similarly, the distance between the centers of gears with 14 teeth and 40 teeth is the same as 3.5 + 10 = 13.5
 The pipe used for the outer shaft is a rod antenna. When disassembled, you can get brass pipes of various sizes. gia
The pipe used for the outer shaft is a rod antenna. When disassembled, you can get brass pipes of various sizes. giaThe shaft of the step motor has a diameter of 5 mm. It connects it with a universal joint that has a margin from the diameter of 3 mm used for the gear shaft.
The part that connects the short hand, the long hand, and the shaft is not fixed but is fitted in a spring shape.
This is made so that other parts can be disassembled by screwing so that it can be disassembled and adjusted or remade.
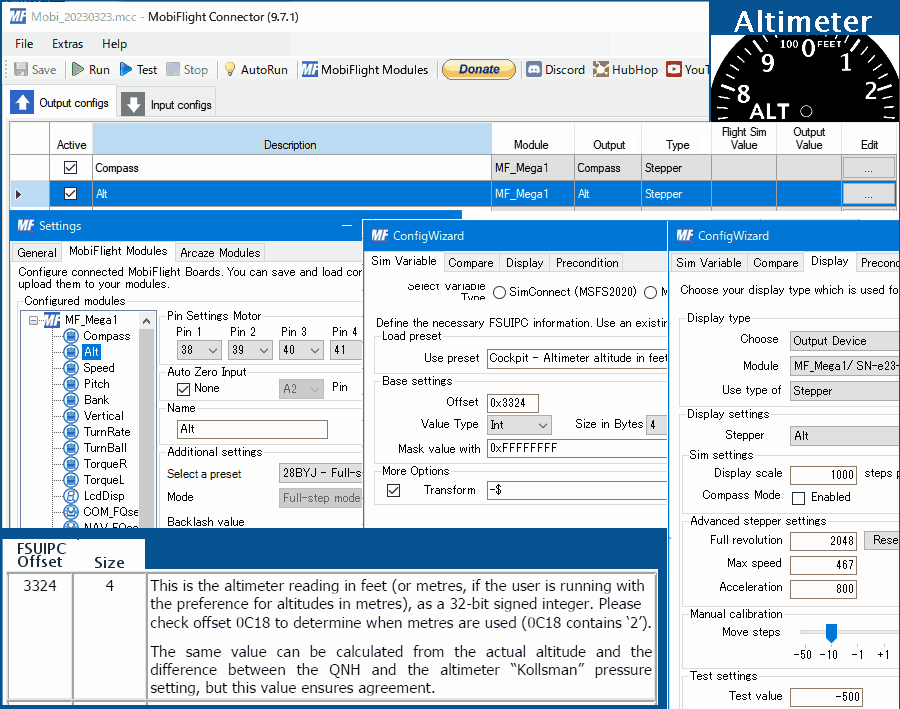
Mobiflight setting is a negative value in Transform. This is to reverse the direction of rotation.
The StepMotor 28BYJ-48 used requires 2048 steps to rotate 360 °. 2048step, with a value of 1000 from FSUIPC, In other words, it is set to rotate once.
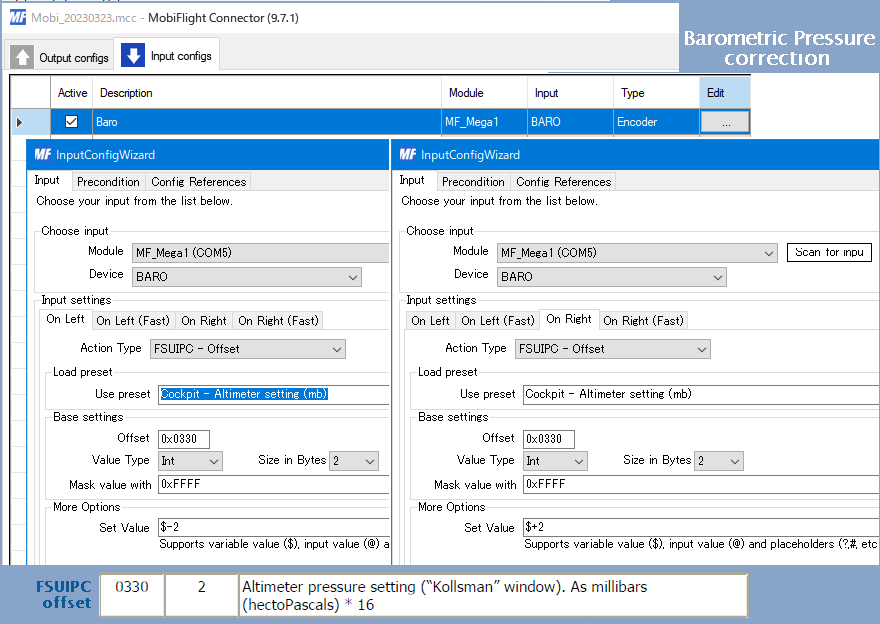
Barometric pressure correction
Actual altitude measurement is done by measuring atmospheric pressure. The surface pressure changes due to high pressure and low pressure, so I have secured a location at the bottom left to attach the rotary encoder so that atmospheric pressure correction can be performed.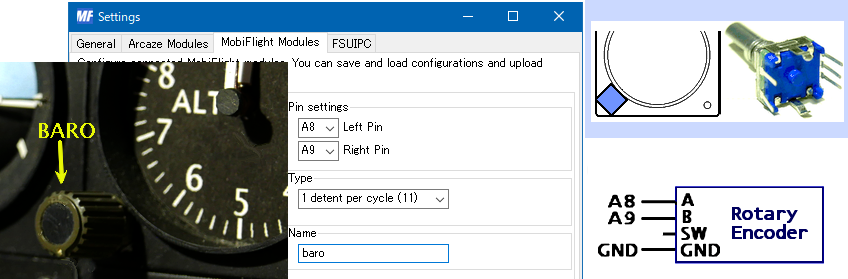
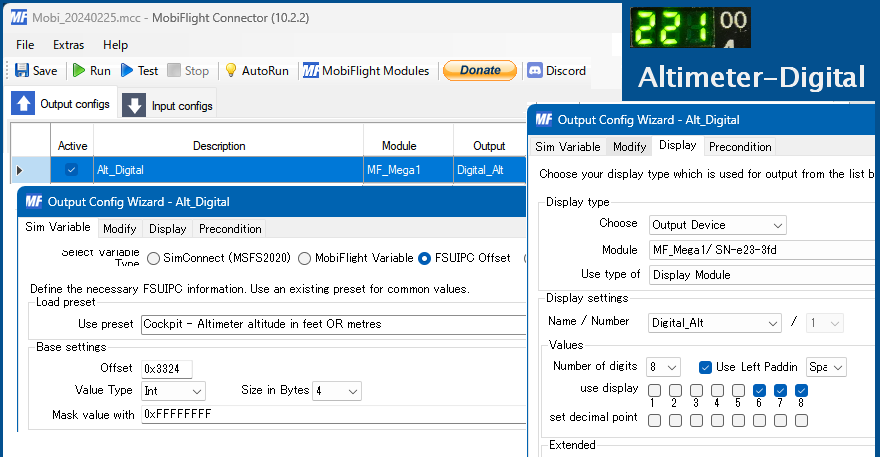
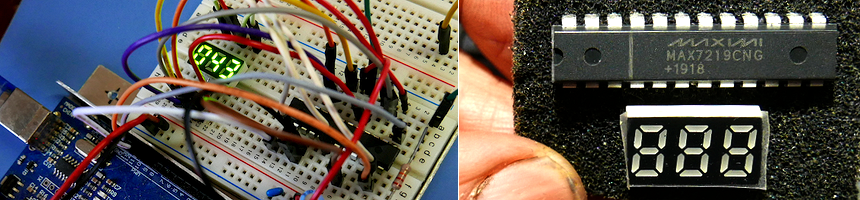
Digital-Altimeter
Digital display
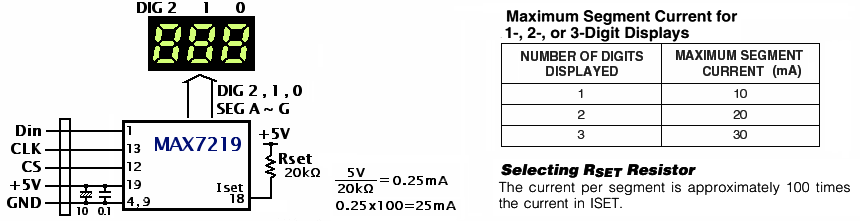
Now that I have a small 7-segment LED, I started working on adding an advanced digital display. It is 3 digits and fits in a width of 15 mm, it can be built into the altimeter.The MAX7219 I got doesn't seem to be the original product, so I tried it on a breadboard to see if it worked. 43feet shows the altitude on the runway of Kansai Airport RJBB.

Transform is set to $/100 so that the smallest digit is in 100feet units. With this, I can display up to 99900 feet (about 30,000 m).
Mobiflight 9.6 has become unable to display right aligned well. It seems to be related to the display of floating point numbers, but here I use 'Round' to eliminate decimals.
By setting Transform $/100 to Round($/100,0), it will be able to display well.
The SR-71's altitude record of 85069feet (about 26,000m) is fine.