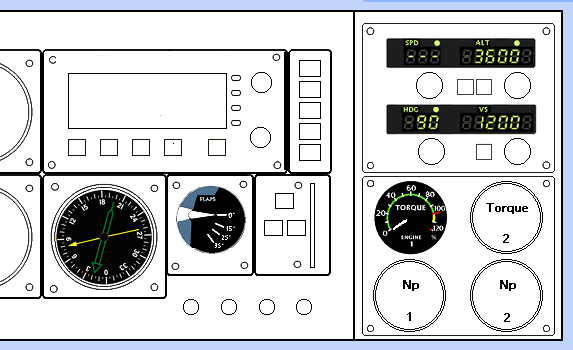
Flaps position indicator
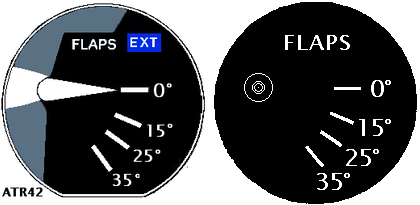
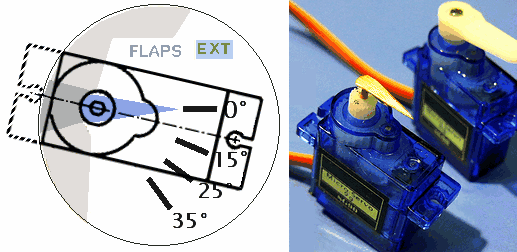
フラップの展開状態を表す表示器を作り始めました。 ATR42機のコックピット機器を手本にしています。 翼端に伸びるフラップの状態がイメージできる表示です。ATR72機では表示は3段階ですが、ATR42機は0°,15°,25°,35°の4段階です。
操作するフラップレバーよりも、実際のフラップは油圧で動作するので 少し遅れます。その状態も表してくれます。
サーボモーター
Mobiflightではステッピングモーターの接続をArduino1台につき 10個に制限されています。すでに10個使い切っていること、それに動作角度が小さいので この機器にはサーボモーターを使ってみました。サーボモーターSG90の回転角は180°までですので使用できる機器が限られます。また、動作電圧は5Vですが、電流は最大1Aを越えるようなのでArduinoの端子から電源は取れません。
ステッピングモーターは動作音は聞きとれないくらいでしたが、サーボモーターはしっかり動作音がします。フラップ油圧モーターの動作音と考えましょう。
Mobiflight設定
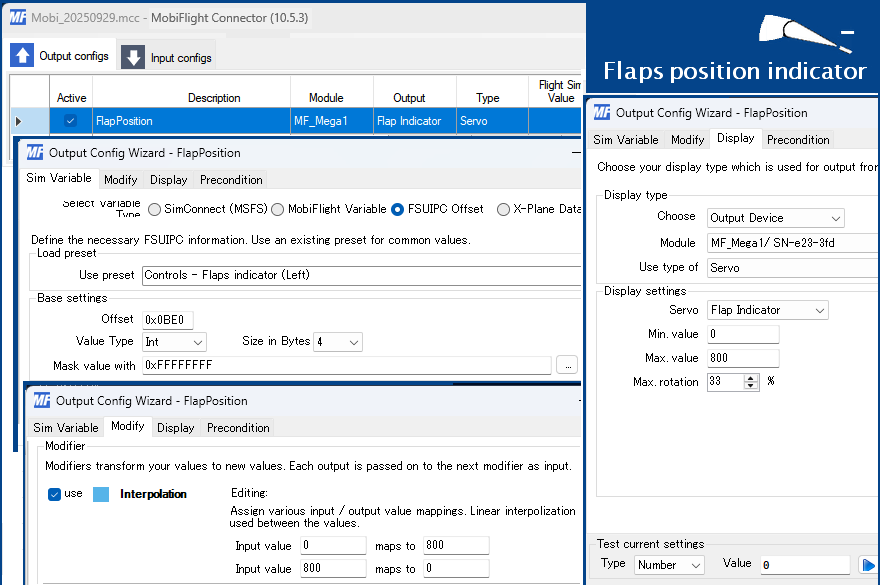
 サーボモーターの回転方向は 軸側から見て 左(反時計)回りに動くのが基本だそうです。メーターを製作するためには、右(時計)回りに動いてくれないと使えません。このフラップ位置を示す計器でも 0°の位置から右回りに回転してほしいのです。
サーボモーターの回転方向は 軸側から見て 左(反時計)回りに動くのが基本だそうです。メーターを製作するためには、右(時計)回りに動いてくれないと使えません。このフラップ位置を示す計器でも 0°の位置から右回りに回転してほしいのです。逆に回転させるには ギアを一段使えばできますが、ここでは Mobiflightのconfig設定にあるModifyを使いました。
しかし これを試してみると電源が入ったとたんに、指針が180°左回転して 0の位置へ移動します。そのため 動作範囲が60°くらいの回転角度になるよう Max rotation を33%にしておきます。180°x0.33=59.4°
サーボモーターの取り付け
 メーターのサイズ径がちいさくて 回転軸が中央ではないので、モーターは斜めにして入れました。はみ出した片側の取り付けタブ部分は切り取りました。
メーターのサイズ径がちいさくて 回転軸が中央ではないので、モーターは斜めにして入れました。はみ出した片側の取り付けタブ部分は切り取りました。モーター軸の周囲に出っ張りもあり、小さなネジ1本だけでは固定するのは難しい。アルミ板で小文字ωの形の枠を作って支えました。
付属のアーム部品をサーボホーン と言うそうですが、これは出力軸にしっかりネジで固定でき、ロボットの腕などを作るときには必要だと思います。でも、これを使うと 中央にネジの頭が見えて残ること、回転がメーター中央ではないので 固定によって設定ミスなどで外枠に指針が当たることも考えられます。無理に回転を止めるとモーターの加熱などが起こります。私はメーターの指針として使いたいので 力はかけません。はめ込みで軽く固定しておくほうが事故を防げます。
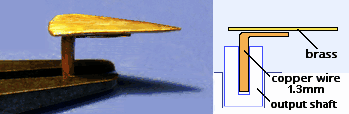 モーターの出力軸中央に開いている約1.3mm径 6mm長ほどの穴を取り付けに使います。太い銅線をここへしっかりはめ込めるサイズに削り、上端を曲げて つぶし、真鍮の指針をハンダ付けして指針を作りました。
モーターの出力軸中央に開いている約1.3mm径 6mm長ほどの穴を取り付けに使います。太い銅線をここへしっかりはめ込めるサイズに削り、上端を曲げて つぶし、真鍮の指針をハンダ付けして指針を作りました。EXTフラグは(必要ないので)作りません。これはフラップバルブが油圧でフラップ展開を指示していることを示すもの。フラップ展開時にEXTフラグが表示されるのは、フラップの油圧回路に漏れがあるときと書かれています。