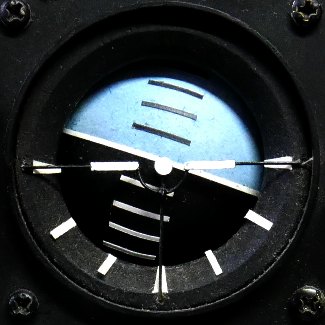
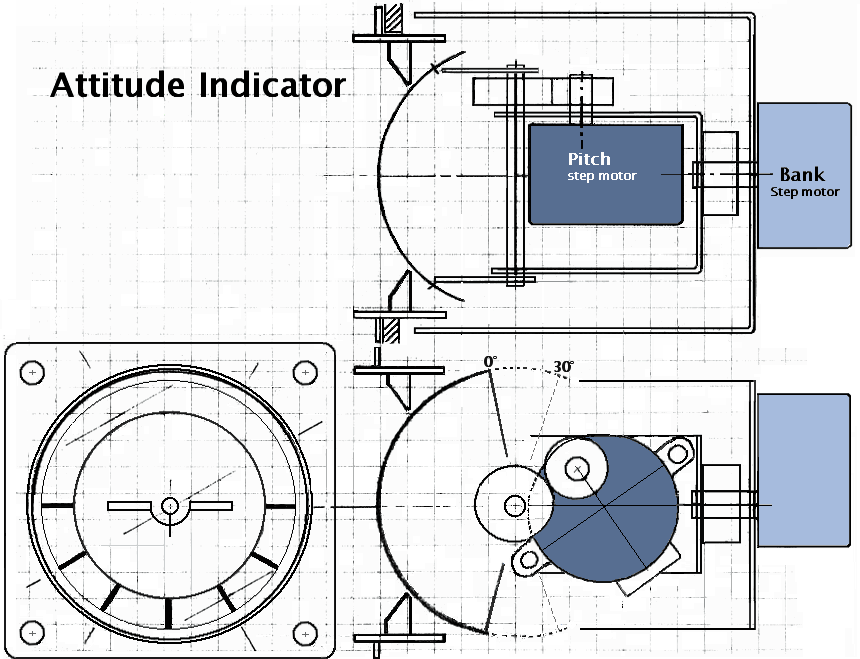
Attitude Indicator
 Pitch と Bank 2つの動きに対して、ステッピングモーターを2つ使用します。
Pitch と Bank 2つの動きに対して、ステッピングモーターを2つ使用します。Pitchは機首の上下の度合いを示す角度、Bankは機体の左右の傾きです。
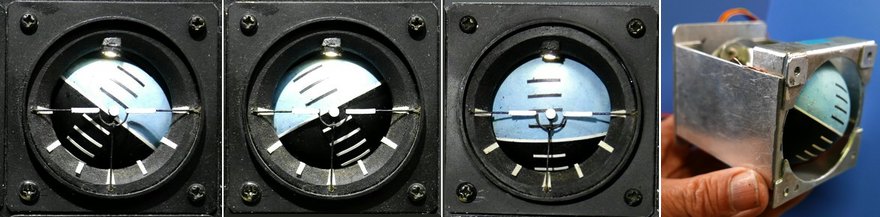
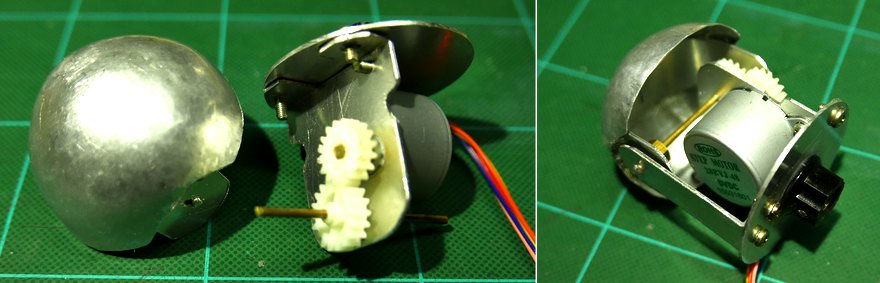
半球を作る
半球の表示部分は アルミニウム板からのたたき出し(打ち出し)です。直径50mmほどの小さな曲面がたたき出しで 私に作れるものか、失敗しても作り直せるので ここは挑戦です。使ったのは0.8mmのアルミニウム板とプラスチックハンマー、曲面の木のたたき台も作っておきます。完全な球面とは言えないのですが、まずまず表示に使える軽い半球が作れました。球面のプラ材を探し回ったり、3Dプリンタなどに頼らず、金属の展性を利用して必要なサイズのものが自分で作れます。自分の技術を高められるいい機会でした。
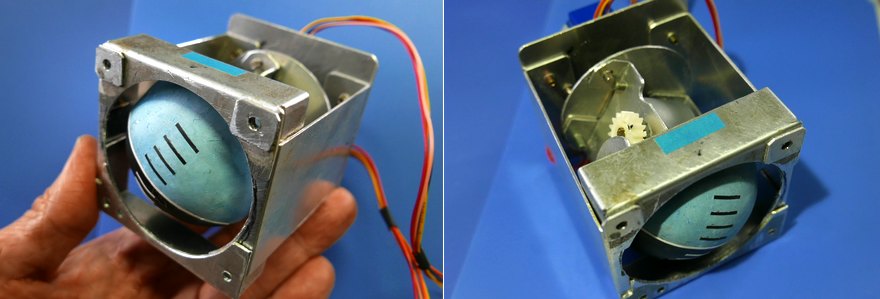
Pitchの軸は貫通させるので、モーター軸をPitch回転の中心から ずらすために 歯車で接続してあります。モーターを乗せたPitch部分全体をBank回転させるので、なるべく中心軸近くに重心がくるように計画しました。また ステッピングモーターへの配線が回転のじゃまをしないか、実際に動作させないと分からなかったのですが、回転角度がそれほど大きくないので ゆとりを持たせておくだけで いけました。
立体的な動きをさせるので、他にも試してみないと分からない部分もあり、なかなか調整が難しく 作り直した所もあります。
目盛りは 他のメーターのようにプリンタで印刷というわけにいかず、細く切ったシールを球面に貼り付けています。
指針
指針は真鍮線0.5mmを曲げています。中央の丸い部分はきれいな円形にするため 3mm丸棒を短く切りました。その背面に切れ込みを入れて真鍮線を挟み込んでいます。ハンダ付けだけで組み立てるのでは、熱が伝わって難しく 強度的にも弱くなります。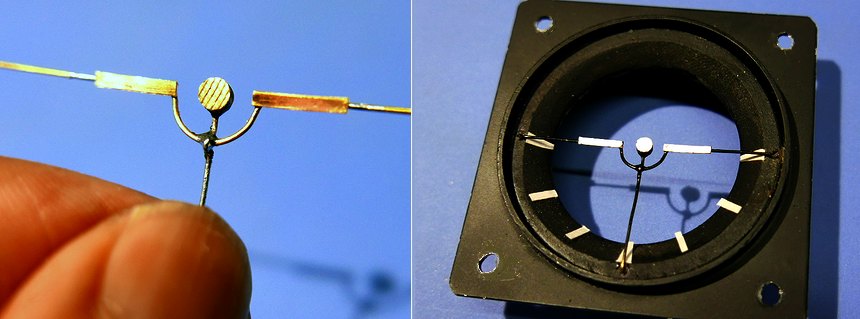
Config設定
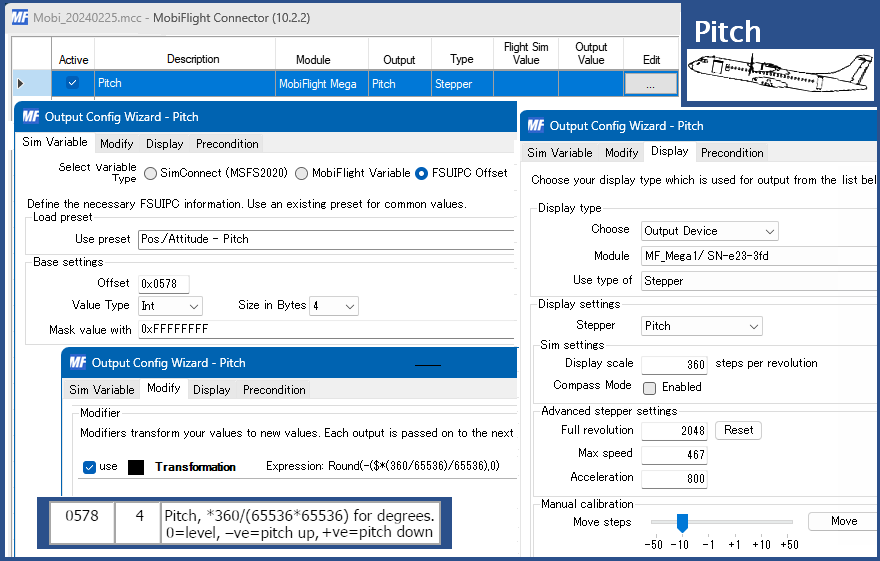
config設定をいろいろ試していますが、ようやく これで良さそうです。Transform で FSUIPCからのデータを角度の値に変換(1°単位)
Pitch --- Round(-($*(360/65536)/65536),0)
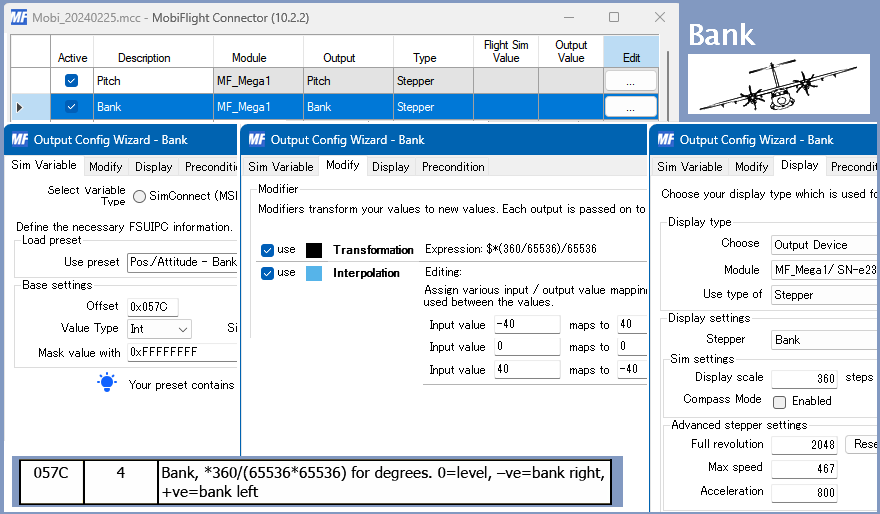
Bank --- $*(360/65536)/65536
ギアを使うことで反転した回転方向をCompare で戻しています。
また、可動範囲である -40°~+40° の範囲を超えた値にならないようにしています。